.jpg)
.jpg)
.jpg)
.jpg)
Nema 8 (20 mm) hybrid steppermotor, bipolar, 4-leder, ACME-ledeskrue, lav støj, lang levetid, høj ydeevne
Nema 8 (20 mm) hybrid steppermotor, bipolar, 4-leder, ACME-ledeskrue, lav støj, lang levetid, høj ydeevne
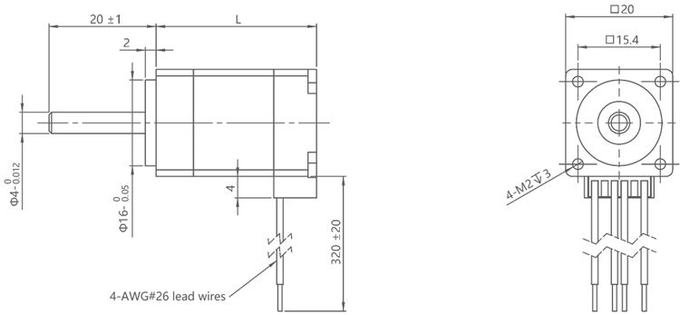
Denne 20 mm hybrid steppermotor fås i tre typer: eksternt drevet, gennemgående akse og gennemgående fast akse. Du kan vælge efter dine specifikke behov.
VSM20HSM standard ekstern motoroversigtstegning:
Beskrivelser
| Produktnavn | 20 mm eksternt drevne hybride steppermotorer |
| Model | VSM20HSM |
| Type | hybride steppermotorer |
| Trinvinkel | 1,8° |
| Spænding (V) | 2,5 / 6,3 |
| Strøm (A) | 0,5 |
| Modstand (ohm) | 5,1 / 12,5 |
| Induktans (mH) | 1,5 / 4,5 |
| Blyledninger | 4 |
| Holdemoment (Nm) | 0,02 / 0,04 |
| Motorlængde (mm) | 30 / 42 |
| Omgivelsestemperatur | -20℃ ~ +50℃ |
| Temperaturstigning | Maks. 80.000 |
| Dielektrisk styrke | 1mA maks. @ 500V, 1KHz, 1sek. |
| Isolationsmodstand | 100MΩ min. @500Vdc |
Certificeringer

Elektriske parametre:
| Motorstørrelse | Spænding/ Fase (V) | Strøm/ Fase (EN) | Modstand/ Fase (Ω) | Induktans/ Fase (mH) | Antal Blyledninger | Rotorinerti (g.cm2) | Holdemoment (Nm) | Motorlængde L (mm) |
| 20 | 2,5 | 0,5 | 5.1 | 1,5 | 4 | 2 | 0,02 | 30 |
| 20 | 6.3 | 0,5 | 12,5 | 4,5 | 4 | 3 | 0,04 | 42 |
Generelle tekniske parametre:
| Radial frigang | 0,02 mm maks. (450 g belastning) | Isolationsmodstand | 100MΩ @500VDC |
| Aksial frigang | 0,08 mm maks. (450 g belastning) | Dielektrisk styrke | 500VAC, 1mA, 1s@1KHZ |
| Maks. radial belastning | 15N (20 mm fra flangeoverfladen) | Isoleringsklasse | Klasse B (80K) |
| Maks. aksial belastning | 5N | Omgivelsestemperatur | -20℃ ~ +50℃ |
Skruespecifikationer:
| Blyskruediameter (mm) | Bly (mm) | Trin (mm) | Selvlåsende kraft ved slukning (N) |
| 3,5 | 0,6096 | 0,003048 | 80 |
| 3,5 | 1 | 0,005 | 40 |
| 3,5 | 2 | 0,01 | 10 |
| 3,5 | 4 | 0,02 | 1 |
| 3,5 | 8 | 0,04 | 0 |
Momentfrekvenskurve
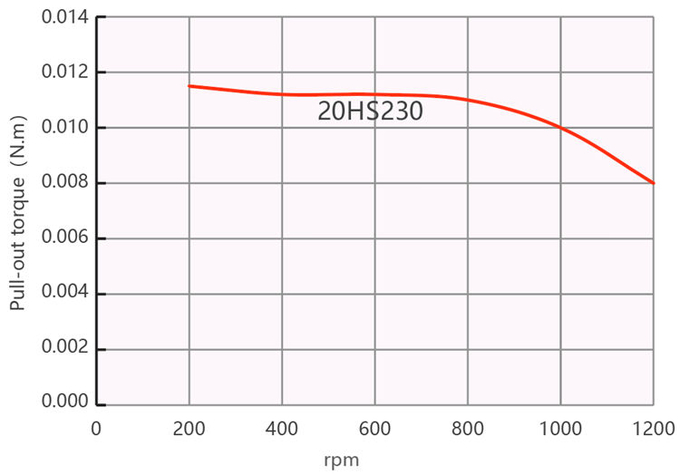
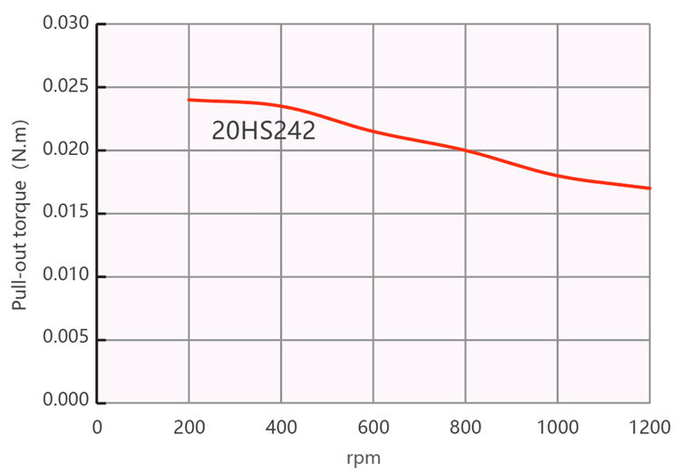
Testbetingelse:
Chopper-drev, halv mikrostepping, drivspænding 24V
Anvendelsesområder
3D-printning:20 mm hybride steppermotorer kan bruges til bevægelseskontrol i 3D-printere til at drive printhovedet, scenen og det aksiale bevægelsessystem.
Automationsudstyr: Disse steppermotorer bruges almindeligvis i automationsudstyr, såsom automatiske pakkemaskiner, automatiske samlebånd, robotarme til automatisk håndtering osv., til at styre præcis position og hastighed.
Robotik:Inden for robotteknologi bruges 20 mm hybride steppermotorer til at styre robotters ledbevægelser for at opnå præcis kontrol af position og bevægelsesretning.
CNC-maskiner:Disse steppermotorer bruges også i CNC-maskiner til at drive præcise bevægelser af værktøjer eller borde til højpræcisionsbearbejdning.
Medicinsk udstyr:I medicinsk udstyr kan 20 mm hybride steppermotorer bruges til præcist at styre bevægelsen af komponenter i medicinsk udstyr, såsom kirurgiske robotter og lægemiddelafgivelsessystemer.
Biludstyr:I bilindustrien kan disse steppermotorer bruges til at styre positionen og bevægelsen af bilkomponenter, såsom vinduesløfte- og sænkesystemer, sædejusteringssystemer og så videre.
Smart hjem:Inden for smart home-området kan 20 mm hybride steppermotorer bruges til at styre åbning og lukning af gardiner, roterende kameraer i hjemmealarmsystemer osv.
Dette er blot nogle af de almindelige anvendelsesområder for 20 mm hybride steppermotorer. Faktisk har steppermotorer en bred vifte af anvendelser i forskellige brancher og områder. Specifikke anvendelsesscenarier afhænger også af deres specifikke specifikationer, ydeevne og kontrolkrav.
Fordel
Nøjagtighed og positioneringsevne:Hybride steppermotorer tilbyder høj nøjagtighed og positioneringskapacitet til fine trinbevægelser, ofte med lave trinvinkler som 1,8 grader eller 0,9 grader, hvilket resulterer i mere præcis positionskontrol.
Højt drejningsmoment og høj hastighed:Hybride steppermotorer er strukturelt designet til at give et højt drejningsmoment og, med den rigtige driver og controller, høj hastighed. Dette gør dem velegnede til applikationer, der kræver både højt drejningsmoment og bevægelse med høj hastighed.
Styrbarhed og programmerbarhed:Hybride steppermotorer er et åbent sløjfe-styringssystem med god styrbarhed. De kan styres præcist i hvert bevægelsestrin af controlleren, hvilket resulterer i meget programmerbare og kontrollerbare bevægelsessekvenser.
Enkel kørsel og kontrol:Hybride steppermotorer har relativt enkle driv- og styrekredsløb sammenlignet med andre typer motorer. De kræver ikke brug af positionsfeedback-enheder (f.eks. encodere) og kan styres direkte af passende drivere og controllere. Dette forenkler systemdesign og installation og reducerer omkostningerne.
Høj pålidelighed og stabilitet:Hybride steppermotorer tilbyder høj pålidelighed og stabilitet på grund af deres enkle konstruktion, lille antal bevægelige dele og børsteløse design. De kræver ikke regelmæssig vedligeholdelse, har en lang levetid og giver stabil ydeevne ved korrekt brug og drift.
Energieffektiv og støjsvag:Hybride steppermotorer er energieffektive og leverer et højt udgangsmoment ved relativt lav effekt. Derudover fungerer de typisk ved at producere lavere støjniveauer, hvilket giver dem en fordel i støjfølsomme applikationer.
Krav til motorvalg:
►Bevægelses-/monteringsretning
►Belastningskrav
►Krav til slagtilfælde
►Krav til slutbearbejdning
►Præcisionskrav
►Krav til encoderfeedback
►Krav til manuelle justeringer
►Miljøkrav
Produktionsværksted



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)