




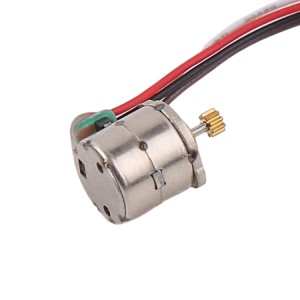
Højmoment mikro 35 mm steppermotor til printer
Beskrivelse
Der er to viklingsmetoder for steppermotorer: bipolar og unipolar.
1. Bipolære motorer
Vores bipolare motorer har generelt kun to faser, fase A og fase B, og hver fase har to udgående ledninger, som har separate viklinger. Der er ingen forbindelse mellem de to faser. Bipolare motorer har 4 udgående ledninger.
2. Unipolære motorer
Vores unipolare motorer har generelt fire faser. Baseret på to faser i bipolare motorer tilføjes to fælles linjer.
Hvis fælles ledninger er forbundet sammen, er de udgående ledninger 5 ledninger.
Hvis fællesledninger ikke er forbundet sammen, er de udgående ledninger 6 ledninger.
En unipolar motor har 5 eller 6 udgående linjer.
Parametre
| Spænding | 8DV DC |
| Antal faser | 4 Fase |
| Trinvinkel | 7,5°±7% |
| Viklingsmodstand (25 ℃) | 16Ω±10% |
| Nuværende fase | 0,5A |
| Spærremoment | ≤110 g.cm |
| Maksimal indtrækshastighed | 400 PPS |
| Holdemoment | 450 g. cm² |
| Viklingstemperatur | ≤85K |
| Didlektrisk styrke | 600 VAC 1 SEK 1 mA |
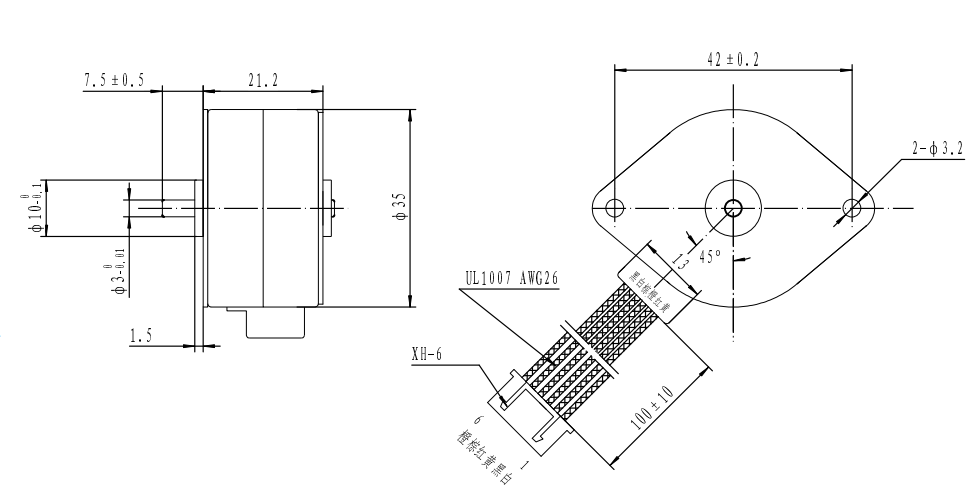
Designtegning
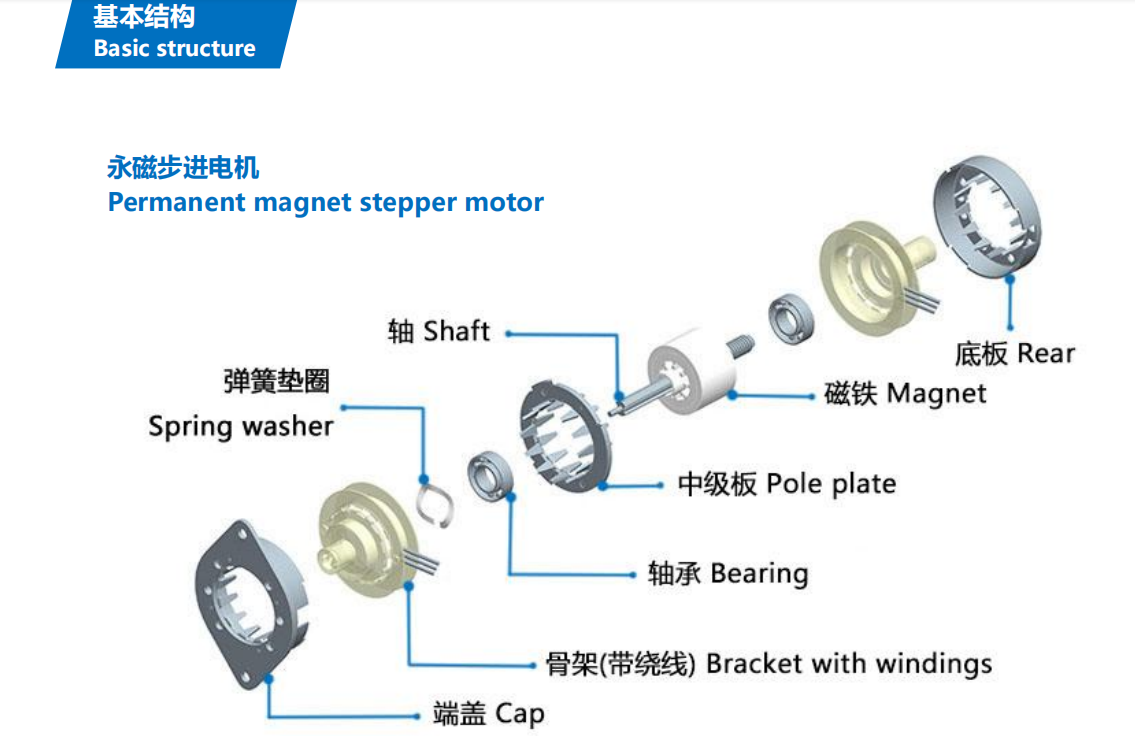
Om den grundlæggende struktur af PM-steppermotoren
Funktioner og fordele
1. Høj præcisionspositionering
Da steppere bevæger sig i præcise, gentagelige trin, udmærker de sig i applikationer, der kræver præcision
positionering, efter antallet af trin motoren bevæger sig
2. Højpræcisionshastighedskontrol
Præcise bevægelsestrin giver også mulighed for fremragende kontrol af rotationshastigheden for processen
automatisering og robotteknologi. Rotationshastigheden bestemmes af pulsfrekvensen.
3. Pause- og ventefunktion
Med styring af drevet har motoren en låsefunktion (der er strøm gennem motorviklingerne, men
motoren roterer ikke), og der er stadig et holdemomentudgang.
4. Lang levetid og lav elektromagnetisk interferens
Steppermotoren har ingen børster og behøver ikke at blive kommuteret af børster som en børstemotor.
DC-motor. Der er ingen friktion mellem børsterne, hvilket øger levetiden, der ikke er nogen elektriske gnister og reducerer elektromagnetisk interferens.
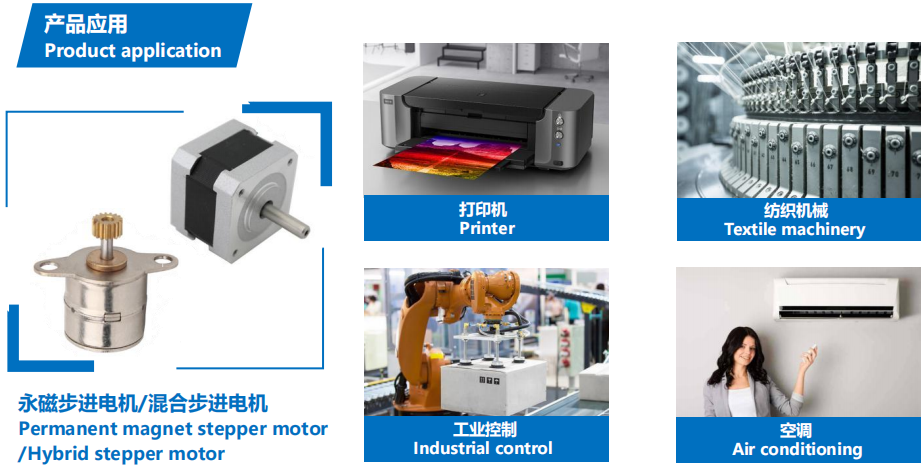
Anvendelse af PM steppermotor
Printer
Tekstilmaskiner
Industriel kontrol
Aircondition
Funktionsprincip for steppermotor
Steppermotorens drev styres af software. Når motoren skal rotere, vil drevet
anvende steppermotorpulser. Disse pulser aktiverer steppermotorer i en bestemt rækkefølge, hvorved
hvilket får motorens rotor til at rotere i en bestemt retning (med uret eller mod uret). Således
opnå korrekt rotation af motoren. Hver gang motoren modtager en puls fra driveren, vil den rotere med en trinvinkel (med fuldtrinsdrev), og motorens rotationsvinkel bestemmes af antallet af drevne pulser og trinvinklen.
Leveringstid og emballageoplysninger
Leveringstid for prøver:
Standardmotorer på lager: inden for 3 dage
Standardmotorer ikke på lager: inden for 15 dage
Tilpassede produkter: Cirka 25~30 dage (baseret på tilpasningens kompleksitet)
Leveringstid for at bygge en ny form: generelt omkring 45 dage
Leveringstid for masseproduktion: baseret på ordremængde
Emballage:
Prøver pakkes i skumsvamp med en papkasse og sendes med ekspres
Masseproduktion, motorer pakkes i bølgepapkartoner med gennemsigtig film på ydersiden. (forsendelse med fly)
Hvis produktet sendes med skib, pakkes det på paller

Betalingsmetode og betalingsbetingelser
For prøver accepterer vi generelt Paypal eller Alibaba.
Til masseproduktion accepterer vi T/T-betaling.
For prøver opkræver vi fuld betaling før produktion.
Ved masseproduktion kan vi acceptere 50% forudbetaling før produktion og opkræve de resterende 50% før forsendelse.
Når vi har samarbejdet om ordrer mere end 6 gange, kan vi forhandle andre betalingsbetingelser såsom A/S (efter syn)
Send din besked til os:
Produktkategorier
-

20 mm mikro-steppermotor kan matches med g...
-

15x mikro stepmotor 2-faset 4-leder 18 grader...
-

Støjsvag høj kvalitet 3,3V 6 mm mikro stepper m ...
-
8 mm mini mikro steppermotor 2 faset 18 grader ...
-

10BY mini 5v 10mm diameter mikro steppermotor ...
-

20 mm permanent magnet 12V mikro steppermotor til...