Der er behov for forskellige motorer inden for mange områder, herunder den velkendtesteppermotorerog servomotorer. Mange brugere forstår dog ikke de vigtigste forskelle mellem disse to typer motorer, så de ved aldrig, hvordan de skal vælge. Så hvad er de vigtigste forskelle mellemsteppermotorerog servomotorer?
Servomotor
1. Arbejdsprincip
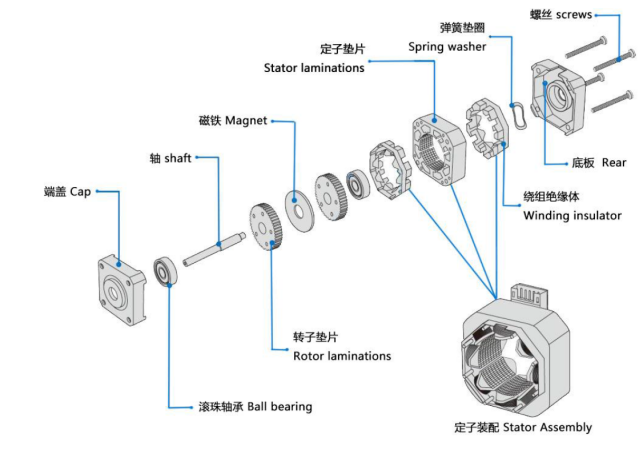
Disse to motorer er meget forskellige i princippet. Steppermotorer omdanner det elektriske pulssignal til en vinkelforskydning eller lineær forskydning af steppermotordele i åben sløjfe. Se steppermotorens arbejdsprincip.
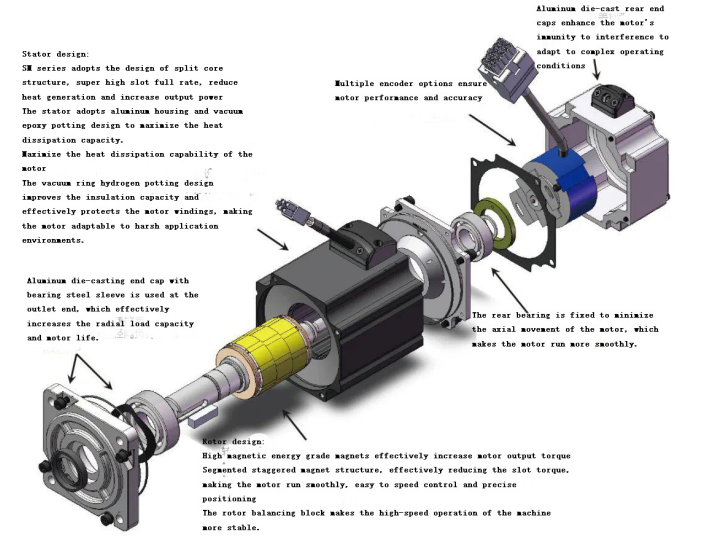
Og servoen er primært afhængig af pulser for at positionere. Servomotoren har i sig selv funktionen at sende pulser ud. For hver rotation af en vinkel sender servomotoren det tilsvarende antal pulser ud, så servomotoren danner et ekko eller en lukket sløjfe for at modtage pulsen. Systemet ved præcist, hvor mange pulser der sendes og modtages tilbage, så det præcist kan styre motorens rotation for at opnå præcis positionering.
2. Kontrolnøjagtighed
Præcisionen af en steppermotor opnås generelt ved præcis styring af trinvinklen, som har mange forskellige underinddelte gear for at opnå præcis styring.
Servomotorens styringsnøjagtighed garanteres af den roterende encoder bag på motorakslen, og servomotorens styringsnøjagtighed er generelt højere end steppermotorens.
3. Hastighed og overbelastningskapacitet
Steppermotorer er tilbøjelige til lavfrekvente vibrationer ved lav hastighed, så når steppermotoren arbejder ved lav hastighed, skal den normalt også bruge dæmpningsteknologi for at overvinde fænomenet med lavfrekvente vibrationer, såsom at tilføje dæmpere på motoren eller drevet ved hjælp af underopdelingsteknologi osv., mens servomotoren ikke oplever dette fænomen, bestemmer dens lukkede kredsløbsstyringskarakteristika dens højhastighedsdrift for at opretholde fremragende ydeevne. Momentfrekvenskarakteristikkerne for de to er forskellige, og generelt er servomotorens nominelle hastighed større end steppermotorens.
Steppermotorens udgangsmoment falder, når hastigheden stiger, mens servomotoren har et konstant moment, så steppermotoren generelt ikke har nogen overbelastningskapacitet, mens AC-servomotoren har en stærkere overbelastningskapacitet.
4、Løbeevne
Steppermotorer er generelt åbne kredsløbsstyrede. I tilfælde af for høj startfrekvens eller for stor belastning vil der opstå ude af trit eller et fænomen med tilstopning. Derfor er det nødvendigt at håndtere hastighedsproblemer eller øge encoderens closed-loop-styring. Se, hvad en closed-loop steppermotor er. Servomotorer bruger closed-loop-styring, hvilket gør dem nemmere at styre og ikke har et trintab.
5. Omkostninger
Steppermotorer er fordelagtige med hensyn til omkostningseffektivitet. For at opnå den samme funktion, er prisen for en servomotor højere end for en steppermotor med samme effekt. Servomotorens høje respons, høje hastighed og fordelene ved høj præcision bestemmer produktets høje pris, hvilket er uundgåeligt.
Kort sagt er der store forskelle på steppermotorer og servomotorer, både med hensyn til arbejdsprincip, styringsnøjagtighed, overbelastningskapacitet, driftsydelse og omkostninger. Men de to har deres egne fordele, og brugere, der ønsker at vælge mellem dem, skal kombinere deres faktiske behov og anvendelsesscenarier.
Opslagstidspunkt: 9. november 2022