Lukket kredsløbsteppermotorerhar ændret forholdet mellem ydelse og omkostninger i mange bevægelsesstyringsapplikationer. Succesen med VIC closed-loop progressive motorer har også åbnet muligheden for at erstatte dyre servomotorer med billigesteppermotorerI et stigende antal industrielle automatiseringsapplikationer af høj standard ændrer teknologiske fremskridt forholdet mellem ydelse og omkostninger mellem steppermotorer og servomotorer.
Steppermotorer versus servomotorer
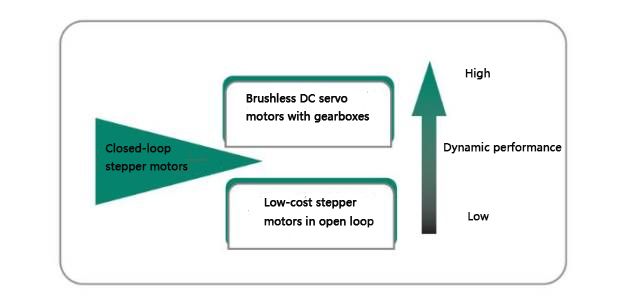
Ifølge den gængse opfattelse fungerer servostyringssystemer bedre i applikationer, hvor der kræves hastigheder over 800 o/min og høj dynamisk respons. Steppermotorer er mere egnede til applikationer med lavere hastigheder, lav til medium acceleration og højt holdemoment.
Så hvad er grundlaget for denne konventionelle visdom om steppermotorer og servomotorer? Lad os analysere det mere detaljeret nedenfor.
1. Enkelhed og omkostninger
Steppermotorer er ikke kun billigere end servomotorer, de er også enklere at idriftsætte og vedligeholde. Steppermotorer er stabile ved stilstand og holder deres position (selv med dynamiske belastninger). Hvis der kræves højere ydelse til bestemte applikationer, skal der dog anvendes dyrere og mere komplekse servomotorer.
2. Struktur
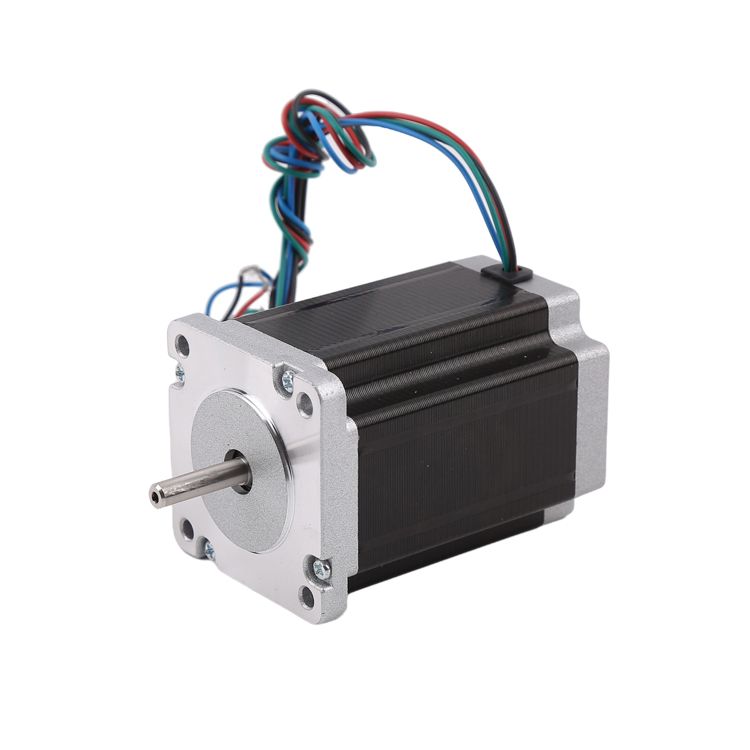
Steppermotorerroterer trinvis ved hjælp af magnetiske spoler til gradvist at trække en magnet fra én position til den næste. For at bevæge motoren 100 positioner i en hvilken som helst retning kræver kredsløbet, at der udføres 100 trinoperationer på motoren. Stepmotorer bruger pulser til at opnå trinvise bevægelser, hvilket muliggør præcis positionering uden brug af feedbacksensorer.
Servomotorens bevægelsesmetode er anderledes. Den forbinder en positionssensor - dvs. en encoder - til den magnetiske rotor og registrerer kontinuerligt motorens nøjagtige position. Servomotoren overvåger forskellen mellem motorens faktiske position og den beordrede position og justerer strømmen i overensstemmelse hermed. Dette lukkede system holder motoren i den korrekte bevægelsestilstand.

3. Hastighed og drejningsmoment
Forskellen i ydeevne mellem stepper- og servomotorer stammer fra deres forskellige motordesignløsninger.Steppermotorerhar et meget større antal poler end servomotorer, så en fuld omdrejning af en steppermotor kræver mange flere viklingsstrømudvekslinger, hvilket resulterer i et hurtigt fald i drejningsmomentet ved stigende hastigheder. Derudover kan steppermotoren miste sin hastighedssynkroniseringsfunktion, hvis det maksimale drejningsmoment nås. Af disse grunde er servomotorer den foretrukne løsning i de fleste højhastighedsapplikationer. Derimod er det højere antal poler i en steppermotor fordelagtigt ved lavere hastigheder, når steppermotoren har en drejningsmomentfordel i forhold til en servomotor af samme størrelse.
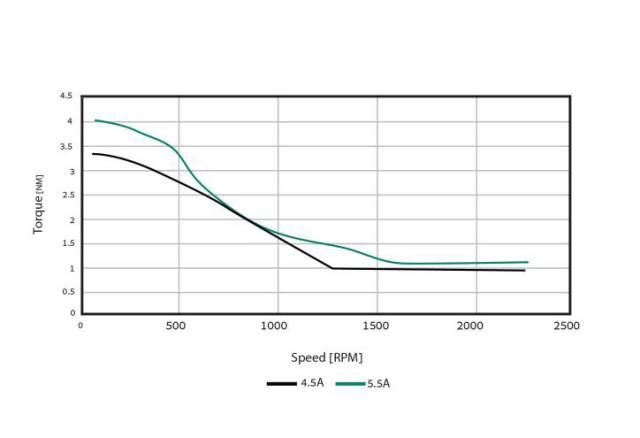
Når hastigheden øges, falder steppermotorens drejningsmoment
4. Positionering
Der er vigtige forskelle mellem steppermotorer og servomotorer i applikationer, hvor maskinens nøjagtige position skal være kendt til enhver tid. I åbne bevægelsesapplikationer, der styres af steppermotorer, antager styresystemet, at motoren altid er i den korrekte bevægelsestilstand. Men efter et problem, f.eks. en motor, der går i stå på grund af en fastsiddende komponent, er controlleren ikke i stand til at kende maskinens faktiske position, hvilket kan føre til tab af position. Selve servomotorens lukkede kredsløbssystem har en fordel: Hvis den sidder fast i en genstand, vil den registrere det med det samme. Maskinen vil stoppe med at køre og vil aldrig være ude af position.
5. Varme- og energiforbrug
Åbne steppermotorer bruger en fast strøm og afgiver en masse varme. Lukket kredsløbsstyring leverer kun den strøm, der kræves til hastighedssløjfen, og undgår derfor problemet med motoroverophedning.
Sammenligningsoversigt
Servostyringssystemer er bedst egnede til højhastighedsapplikationer, der involverer dynamiske belastningsændringer, såsom robotarme. Stepperstyringssystemer er derimod mere egnede til applikationer, der kræver lav til medium acceleration og højt holdemoment, såsom 3D-printere, transportbånd, subakser osv. Fordi steppermotorer er billigere, kan de reducere omkostningerne ved automatiseringssystemer, når de anvendes. Bevægelsesstyringssystemer, der skal udnytte servomotorernes egenskaber, bliver nødt til at bevise, at disse dyrere motorer er guld værd.
Steppermotorer med lukket sløjfestyring
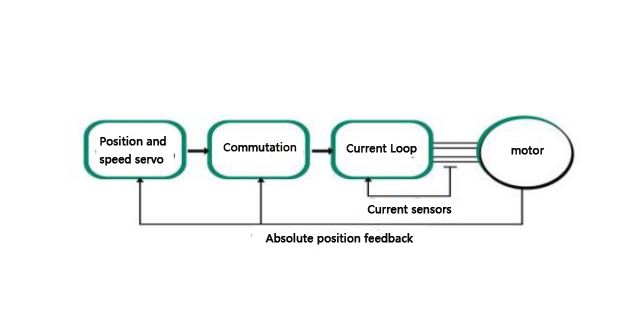
Steppermotoren med integreret elektronisk styring svarer til en tofaset børsteløs DC-motor og kan udføre positionsstyring, hastighedsstyring, DQ-styring og andre algoritmer. En absolut encoder med én omdrejning bruges til lukket sløjfekommutering, hvilket sikrer optimalt drejningsmoment ved enhver hastighed.
Lavt energiforbrug og kølig betjening
VIC-stepmotorer er meget energieffektive. I modsætning til åbne stepmotorer, som altid kører på fuld strømstyring og forårsager varme- og støjproblemer, ændrer strømmen sig i henhold til de faktiske bevægelsesforhold, for eksempel under acceleration og deceleration. I lighed med servoer er den strøm, der forbruges af disse stepmotorer på et givet tidspunkt, proportional med det faktisk krævede drejningsmoment. Fordi motoren og det integrerede elektroniske styrekort kører køligere, kan VIC-stepmotorer opnå højere spidsmomenter sammenlignet med servomotorer.
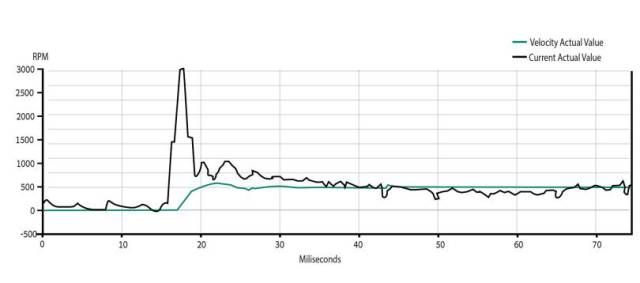
Selv ved høje hastigheder kræver VIC-steppermotorer mindre strøm
Drevet af fremskridt inden for lukket kredsløbsteknologi er steppermotorer i stand til at trænge ind i højtydende, højhastighedsapplikationer, der tidligere udelukkende tilhørte servomotorer.
Steppermotorer med lukket sløjfeteknologi
Hvad nu hvis fordelene ved closed-loop servoteknologi kunne anvendes på steppermotorer?
Kunne vi opnå sammenlignelig ydeevne med servomotorer, samtidig med at vi realiserer omkostningsfordelene ved steppermotorer?
Ved at kombinere closed-loop-styringsteknologi ville steppermotoren blive et omfattende produkt med fordelene ved både servo- og steppermotorer til en lav pris. Fordi closed-loop steppermotorer tilbyder betydelige forbedringer i ydeevne og energieffektivitet, kan de erstatte dyrere servomotorer i et stigende antal højstandardapplikationer.
Følgende er et eksempel på en VIC-integreret steppermotor med indlejret closed-loop-styring for at forklare ydeevnen samt fordele og ulemper ved steppermotorer med closed-loop-teknologi.
Præcis afstemte ydelseskrav
For at sikre tilstrækkeligt drejningsmoment til at overvinde forstyrrelser og undgå tabte trin, skal åbne steppermotorer normalt sikre, at drejningsmomentet er mindst 40 % højere end den værdi, der kræves af applikationen. Lukkede steppermotorer i dag har ikke dette problem. Når disse steppermotorer går i stå på grund af overbelastning, vil de fortsætte med at holde belastningen uden at miste drejningsmoment. De vil fortsætte med at fungere, efter at overbelastningstilstanden er fjernet. Maksimalt drejningsmoment kan garanteres ved enhver given hastighed, og positionssensoren sikrer, at der ikke er noget trintab. Lukkede steppermotorer kan derfor specificeres til præcist at matche drejningsmomentkravene i den relevante applikation uden behov for en yderligere margin på 40 %.
Med åbne steppermotorer er det vanskeligt at opfylde høje momentkrav på grund af risikoen for mistede trin. Sammenlignet med konventionelle steppermotorer kan VIC lukkede steppermotorer opnå meget hurtig acceleration, lav driftsstøj og lav resonans. De kan operere ved meget højere båndbredder og opnå fremragende ydeevne.
Intet kabinet
Toda integrerer drevstyrekortet med motoren, hvilket reducerer mængden af ledningsføring og forenkler implementeringsløsningen. Med Toda kan du bygge maskiner uden kabinetter.
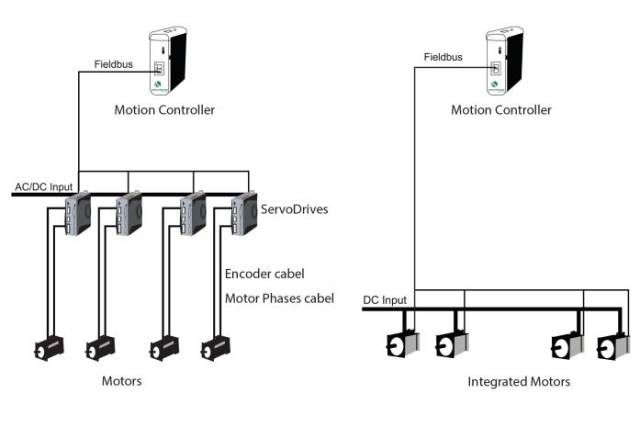
Integration af elektronik med steppermotorer reducerer kompleksiteten
Med closed-loop-teknologi tilbyder closed-loop steppermotorer brugerne fremragende nøjagtighed og effektivitet, med en servomotors ydeevne og den lave pris på en steppermotor. Billigere steppermotorer trænger gradvist ind i applikationer, der ellers ville være domineret af dyre servomotorer.
Opslagstidspunkt: 10. april 2023