Snekkegeartransmissionen består af en snekke og et snekkehjul, og generelt er snekken den aktive del. Snekkegearet har samme højre- og venstregevind, som kaldes henholdsvis højre- og venstregevind. En snekke er et gear med en eller flere spiralformede tænder, der går i indgreb med snekkehjulet og danner et forskudt akselgearpar. Indekseringsfladen kan være cylindrisk, konisk eller cirkulær, og der er fire kategorier: Archimedes-snekke, evolvent snekke, normal lige profilsnekke og konisk omsluttende cylindrisk snekke.
Fordele ved snekkegeartransmission.
✦ Transmissionsforholdet i et trin er stort, generelt i=10~100. I indeksmekanismen til kraftoverførsel kan maksimumet være over 1500.
✦ Den samme meshing er lineær kontakt, som kan modstå stor effekt.
✦ Kompakt struktur, jævn transmission og lav støj.
✦ Når snekkens løftevinkel er mindre end den ækvivalente friktionsvinkel mellem tandhjulene, er den selvspærrende med modslag, dvs. kun snekken kan drive snekkehjulet, ikke snekkehjulet.
Ulemper ved snekkegearsdrev.
✦Med to vinkelrette akser er den lineære hastighed af de to hjulknuder vinkelret, så den relative glidehastighed er stor, let at opvarme og slide.
✦Lav effektivitet, generelt 0,7 til 0,8; snekkegear med selvspærrende snekkegear er endnu mindre effektive, generelt mindre end 0,5.
Gør ensnekkegear steppermotornødvendigvis have selvlåsende ydeevne?
Nej, der er forudsætninger. Når stigningsvinklen er < friktionsvinklen,snekkegear steppermotorkan være selvlåsende.
Normalt når der vælges en steppermotor til gearreduktion, skal brugeren bruge strømsvigtsbeskyttelse eller bremsemotor, så gearreduktionsmotoren vælges med en bremse for at opnå formålet med at stoppe, men det betyder ikke absolut stop, der er stadig en smule inerti.
Hvad er selvlåsning?Konceptet med selvlåsning er, at uanset hvor meget kraft der ikke kan startes, uanset hvor meget inerti der er, så længe den aktive dels arbejde stopper, kan hele maskinen bremse. Snekkegearmotorer har denne selvlåsende ydeevne. Der er ingen selvlåsende ydeevne for gearmotorer, og der er pålidelig selvlåsende ydeevne for snekkegearreduktioner med hastighedsforhold på 1:30 og derover, og jo større reduktionsforholdet er, desto bedre er selvlåsende ydeevnen.
Hvordan vælger man reduktionsforholdet for at sikre den selvlåsende ydeevne af snekkegearets steppermotor?
1. Snekkegearets friktionskoefficient er 0,6, snekkegearets føringsvinkel er mindre end 3°29′11″, det vil sige selvlåsende, og omvendt.
2. Snekkegearets friktionskoefficient er 0,7, snekkegearets føringsvinkel er mindre end 4°03′57″, det vil sige selvlåsende, og omvendt.
3. Når snekkehjulets friktionskoefficient er 0,8, er snekkens stigningsvinkel mindre end 4°38′39″, det vil sige selvlåsende, og omvendt.
Når snekkens forvinkel er mindre end den tilsvarende friktionsvinkel mellem tænderne på det indgribende hjul, har reduktionssteppermotormekanismen selvlåsning, hvilket kan opnå omvendt selvlåsning, det vil sige, at kun snekken kan drive snekkehjulet, men ikke snekkehjulet driver snekken. Generelt i design af tunge maskiner har designere en tendens til at bruge snekkegearmekanismen med selvlåsning, fordi dens omvendte selvlåsning kan spille en meget vigtig rolle i sikkerhedsbeskyttelsen.
Beregningsformel for snekkehjul og snekkegear.
1. Transmissionsforhold = antal snekkehjulstænder ÷ antal snekkehoveder
2. Centerafstand = (snekkehjulsafstand + snekkehjulsafstand) ÷ 2
3. Snekkehjulets diameter = (antal tænder + 2) × modul
4. Snekkehjulsafstand = modul × antal tænder
5. Ormeafstand = ormens ydre diameter - 2 × modul
6. Snekkeføring = π×modul×hoved
7. Helixvinkel (styrevinkel) tgB = (modul × hovedtal) ÷ ormehøjde
8. Snekkeledning = π × modul × hoved
9, Modul = diameter af indekseringscirkel/antal tænder
Antallet af ormehoveder: enkelthovedet orm (der er kun én spiral på ormen, dvs. ormen drejer i en uge, og ormehjulet drejer gennem én tand); dobbelthovedet orm (der er to spiraler på ormen, dvs. ormen drejer i en uge, og ormehjulet drejer gennem to tænder).
Modulus er størrelsen af spiralen på skruen, dvs. jo større modulet er, desto større er spiralen på skruen.
Diameterfaktoren er skruens tykkelse.
Modul: Indekseringscirklen for et gear er benchmarken for design og beregning af dimensionerne for hver del af gearet, og omkredsen af gearets indekseringscirklen = πd = zp, så diameteren af indekseringscirklen
d=zp/π
Da π er et irrationelt tal i ovenstående ligning, er det ikke praktisk at placere indekscirklen som reference. For at lette beregning, fremstilling og inspektion er forholdet p/π nu kunstigt specificeret som nogle simple værdier, og forholdet kaldes modulus (modul), udtrykt som m.
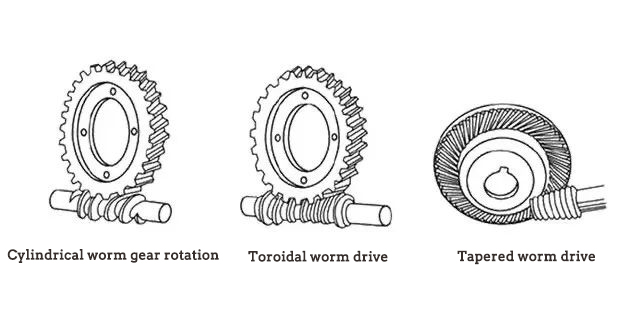
Typer af snekkegear
I henhold til de forskellige former for snekke kan snekke opdeles i cylindrisk snekkedrev, ringformet snekkedrev og konisk snekkedrev. Blandt dem er det cylindriske snekkedrev det mest anvendte.
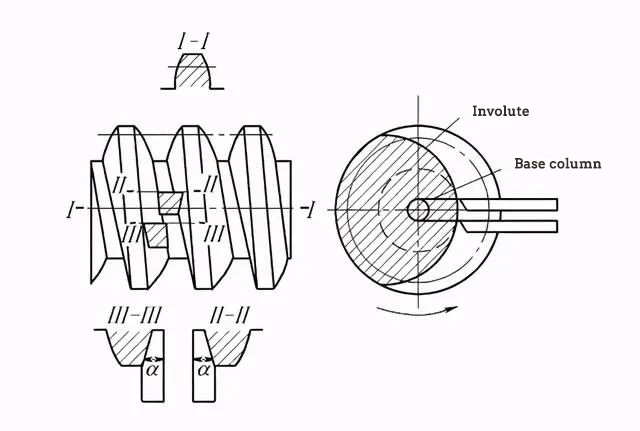
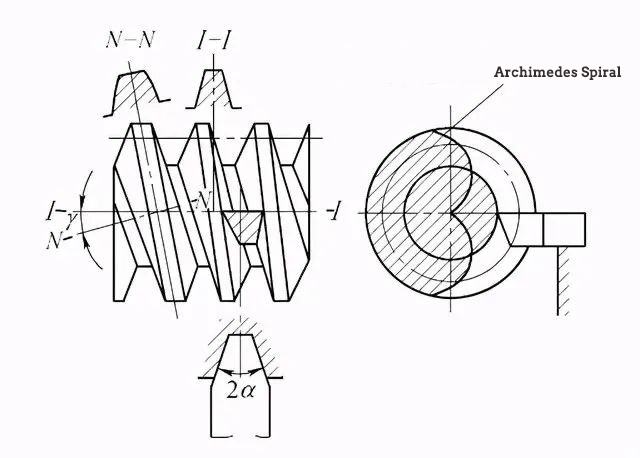
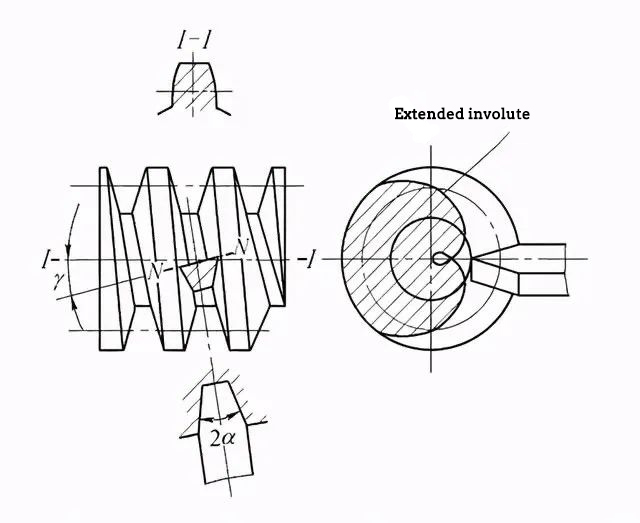
Almindelige cylindriske snekkehjul skæres for det meste på en drejebænk med et drejeværktøj med en lige busklinge. Med variationen af værktøjets monteringsposition og det anvendte værktøj kan der opnås fire typer snekkehjul med forskellige tandprofiler i tværsnittet af den lodrette akse: evolvente snekkehjul (ZI-type), Archimedes snekkehjul (ZA-type), normale lige profilerede snekkehjul (ZN) og koniske, omsluttende cylindriske snekkehjul (ZK).
Evolvent orm (ZI-type)- Bladplanet er tangentielt til snekkebasecylinderen, og endetænderne er evolvente, egnede til højere hastighed og større effekt.
Arkimedisk orm (type ZA)- Tandprofilen vinkelret på akseplanet er en arkimedisk skrue, og tandprofilen i planet forbi aksen er lige, hvilket giver en simpel bearbejdning og lav nøjagtighed. (Aksialt snekkehjul med lige profil).
Normal lige profilsnekke (ZN)- kan bruges til at slibe tænder med modificeret slibeskive, forarbejdningen er enkel, bruges ofte til flerhovedet snekke, transmissionseffektivitet op til 0,9.
Da du har en kort forståelse af transmissionenprincippet omsnekkegearmotorer, hvis der er andet, du gerne vil kommunikere, så venligstkontakt os!
Vi har et tæt samarbejde med vores kunder, lytter til deres behov og handler ud fra deres ønsker. Vi tror på, at grundlaget for et win-win-partnerskab er produktkvalitet og kundeservice.
Changzhou Vic-tech Motor Technology Co., Ltd. er en professionel forsknings- og produktionsorganisation med fokus på motorforskning og -udvikling, samlede løsninger til motorapplikationer samt forarbejdning og produktion af motorprodukter. Ltd. har specialiseret sig i fremstilling af mikromotorer og tilbehør siden 2011. Vores hovedprodukter: miniature steppermotorer, gearmotorer, gearmotorer, undervandsmotorer samt motordrivere og -controllere.

Vores team har over 20 års erfaring med design, udvikling og fremstilling af mikromotorer og kan udvikle produkter og hjælpe designkunder med deres særlige behov! I øjeblikket sælger vi primært til kunder i hundredvis af lande i Asien, Nordamerika og Europa, såsom USA, Storbritannien, Korea, Tyskland, Canada, Spanien osv. Vores forretningsfilosofi "integritet og pålidelighed, kvalitetsorienteret" og værdinormer "kunden først" går ind for præstationsorienteret innovation, samarbejde og effektiv iværksætterånd for at etablere en "byg og del". Det endelige mål er at skabe maksimal værdi for vores kunder.
Opslagstidspunkt: 30. januar 2023